|
|
|
|
|
|
|
|
|

|
|
||||||
|
|
|
|
|
|
|
|
|
| Features | Applications | Technical Information | Options | Videos |
 e-puck
e-puck
Educational and Research Robots
The e-puck is based on a
plastic body supporting the motors, the battery and the electronics. This plastic body will be
transparent allowing all elements of the robot to be visible from outside. The basic part has a
diameter of 70 mm.
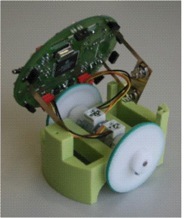 The battery is placed on the
bottom and can be easily removed and recharged separately. A battery protection is implemented to avoid
battery damage. Power on and low battery indicators help in understanding the status of the battery.
The processor can read the battery level. The battery is based on LilON technology, has 5Wh capacity
and is sufficient for approximately 3 hours of use.
The battery is placed on the
bottom and can be easily removed and recharged separately. A battery protection is implemented to avoid
battery damage. Power on and low battery indicators help in understanding the status of the battery.
The processor can read the battery level. The battery is based on LilON technology, has 5Wh capacity
and is sufficient for approximately 3 hours of use.
The two wheels are actuated by stepper motors with 20 steps/revolution through a reduction gear with a ratio of 50:1. The third contact point with the ground is made by the plastic body. The robot is designed to run on flat surfaces such as a table top. If well protected against dust, the robot should be able to run on a standard room floor.
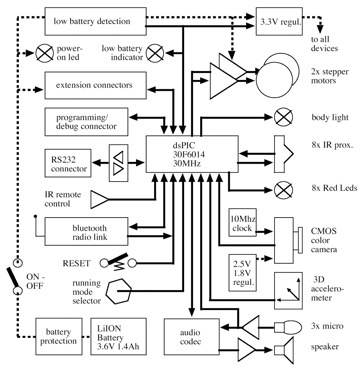 The processor onboard
is a dsPIC 30F6014 running at 60 Mhz (internal, corresponding to 15 MIPS). This processor has both a
standard microcontroller structure and a DSP (digital signal processing) computation unit. Its 16 bits
core is much more advanced than a PIC core (dsPIC has 16 registers and many DSP and C oriented
instructions) and is designed to support C programming. The DSP core brings very high performance in
signal processing applications.
The processor onboard
is a dsPIC 30F6014 running at 60 Mhz (internal, corresponding to 15 MIPS). This processor has both a
standard microcontroller structure and a DSP (digital signal processing) computation unit. Its 16 bits
core is much more advanced than a PIC core (dsPIC has 16 registers and many DSP and C oriented
instructions) and is designed to support C programming. The DSP core brings very high performance in
signal processing applications.
The e-puck is equipped with 8 infrared (IR) proximity sensors with a detection distance of 3-4 centimeters. Other sensors are a 3 axes accelerometer, 3 omnidirectional microphones and a color camera with a resolution of 640x480 pixels. The processor is very well suited for the processing of the IR sensors, of the accelerometer data and the sound. The camera provides a much larger amount of data than the processor can store in its memory. The camera can therefore only be used if small portions of the image or lower quality images are acquired. As output, in addition to the wheels, the e-puck is equipped with a speaker, 8 red LEDs around the body and a green LED inside the transparent body. On the speaker one can output any kind of sound. The 8 red LEDs and the green body LED can be controlled in intensity.
The communication links supported by e-puck are a standard RS232, an infrared remote control and Bluetooth. On Bluetooth there is a serial line emulation supported by any PC, making the communication and the development of PC software very simple.
The e-puck is equipped with several extension connectors allowing the system to be expanded in several ways, with intelligent extensions or very simple interfaces.
 At the software level a
BIOS will be available, including bootloader (through Bluetooth or RS232) and a communication
protocol.
At the software level a
BIOS will be available, including bootloader (through Bluetooth or RS232) and a communication
protocol.
The compiler to generate code for the dsPIC is a ported version of GNU GCC. An article on the e-puck by the developers:
"The e-puck, a Robot Designed for Education in Engineering"
by F. Mondada, M. Bonani, X. Raemy, J. Pugh, C. Cianci, C., A. Klaptocz, S. Magnenat,
J-C. Zufferey, D. Floreano, and A. Martinoli,
Presented at:9th Conference on Autonomous Robot Systems and Competitions, Castelo Branco, Portugal, May 7, 2009.
Links to information at EPFL: Abstract and Pdf File (1.0 Mbyte)
The battery is placed on the
bottom and can be easily removed and recharged separately. A battery protection is implemented to avoid
battery damage. Power on and low battery indicators help in understanding the status of the battery.
The processor can read the battery level. The battery is based on LilON technology, has 5Wh capacity
and is sufficient for approximately 3 hours of use.The two wheels are actuated by stepper motors with 20 steps/revolution through a reduction gear with a ratio of 50:1. The third contact point with the ground is made by the plastic body. The robot is designed to run on flat surfaces such as a table top. If well protected against dust, the robot should be able to run on a standard room floor.
The processor onboard
is a dsPIC 30F6014 running at 60 Mhz (internal, corresponding to 15 MIPS). This processor has both a
standard microcontroller structure and a DSP (digital signal processing) computation unit. Its 16 bits
core is much more advanced than a PIC core (dsPIC has 16 registers and many DSP and C oriented
instructions) and is designed to support C programming. The DSP core brings very high performance in
signal processing applications.The e-puck is equipped with 8 infrared (IR) proximity sensors with a detection distance of 3-4 centimeters. Other sensors are a 3 axes accelerometer, 3 omnidirectional microphones and a color camera with a resolution of 640x480 pixels. The processor is very well suited for the processing of the IR sensors, of the accelerometer data and the sound. The camera provides a much larger amount of data than the processor can store in its memory. The camera can therefore only be used if small portions of the image or lower quality images are acquired. As output, in addition to the wheels, the e-puck is equipped with a speaker, 8 red LEDs around the body and a green LED inside the transparent body. On the speaker one can output any kind of sound. The 8 red LEDs and the green body LED can be controlled in intensity.
The communication links supported by e-puck are a standard RS232, an infrared remote control and Bluetooth. On Bluetooth there is a serial line emulation supported by any PC, making the communication and the development of PC software very simple.
The e-puck is equipped with several extension connectors allowing the system to be expanded in several ways, with intelligent extensions or very simple interfaces.
At the software level a
BIOS will be available, including bootloader (through Bluetooth or RS232) and a communication
protocol.The compiler to generate code for the dsPIC is a ported version of GNU GCC. An article on the e-puck by the developers:
"The e-puck, a Robot Designed for Education in Engineering"
by F. Mondada, M. Bonani, X. Raemy, J. Pugh, C. Cianci, C., A. Klaptocz, S. Magnenat,
J-C. Zufferey, D. Floreano, and A. Martinoli,
Presented at:9th Conference on Autonomous Robot Systems and Competitions, Castelo Branco, Portugal, May 7, 2009.
Links to information at EPFL: Abstract and Pdf File (1.0 Mbyte)
© 2010, AAI Canada, Inc.
AAI Canada, Inc. provides this information as an informational tool to the public,
and is not responsible for any errors in content. All information should be verified by the reader.
General Inquiries: Contact Us
Technical Inquiries: Webmaster